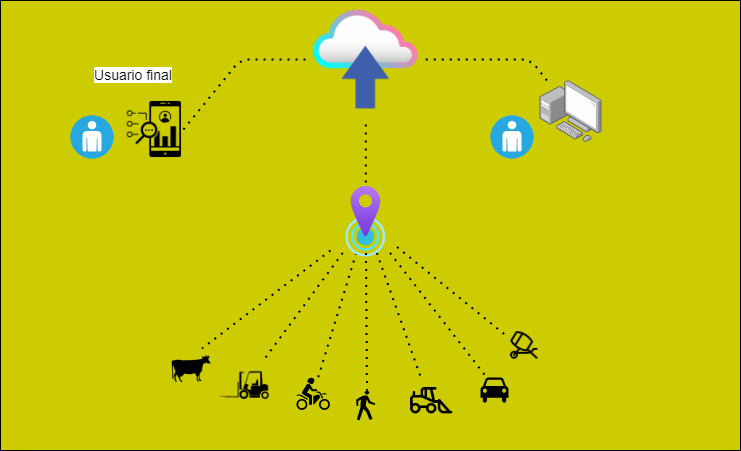
RTLS o Real Time Location System, es un concepto de solución para localizar personas o activos de valor a los que podemos denominar como “objetos de interés”. La implementación de estos sistemas es viable cuando invertir en un sistema de localización de activos supone beneficios directos al minimizar el robo de activos, tales como herramientas y equipos. Otros beneficios pueden ser reducir el tiempo en la ubicación de activos y personas, esto podría ayudar para emitir alertas de tránsito en lugares no autorizados, conocer cuando el objeto de interés tiene demoras excesivas en ciertas ubicaciones, o para lograr el envío de asistencia con precisión.
El avance de la industria 4.0 y en concreto las tecnologías asociadas al IoT han provocado mejoras significativas en el desarrollo de estos sistemas. Actualmente se puede lograr la localización espacial de un objeto con una precisión de ±1 metro, cumpliendo con los requerimientos temporales de las aplicaciones. Haciendo el balance entre los requerimientos del proyecto contra la cantidad de hardware requerido, usualmente se considera aceptable una precisión entre 3 y 5 metros.
Además de la precisión espacial de los datos, se deben tener en cuenta las demoras temporales en la visualización de los activos u objetos de interés (en donde esta montado nuestro dispositivo IoT). Estas demoras se pueden deber a muchos factores internos y externos; entre de los factores inherentes al sistema se asocian primeramente el tiempo de cómputo para la triangulación, y con un impacto mayor el tiempo de sincronización de los dispositivos con el sistema, es decir; la periodicidad con que los dispositivos realizarán la transmisión de información a los gateways y puntos de acceso.
Al igual que con la precisión en la localización espacial de los dispositivos, la precisión en la ubicación temporal se debe definir tomando en cuenta los recursos de los que se dispone. Hablamos en concreto de que la mayor parte de dispositivos IoT de la capa física o “things” tienen un suministro eléctrico finito (que son las baterías), y el tiempo de sincronización debe definirse buscando el equilibrio entre minimizar el uso de la carga de la batería y el cumplir con los requerimientos temporales del sistema, es decir; cuan actualizado quieres que este la ubicación de los dispositivos.
En términos prácticos, para determinar un intervalo adecuado de sicronización para las “things” o dispositivos IoT de la capa física, se deben de tomar en cuenta: la tecnología/protocolo de comunicación a usar, la capacidad de almacenamiento de las baterías (mAh), la carga que consumen nuestros dispositivos cada vez que ellos transmiten y cuando entran en “sleep-mode” o algún otro modo de consumo bajo de energía, la ubicación que tendrán los dispositivos para reemplazar la batería o cargarlos; así como para determinar las cajas o carcasas y los estándares que deben cumplir. Finalmente, el tiempo de vida del proyecto para el que se destinarán los “things”.
El desarrollo de un proyecto siempre debe regirse en función de necesidades del mismo. He descrito algunos puntos, pero respecto al lugar de implementación es esencial la planificación teniendo claridad con respecto a la infraestructura existente y la cobertura de las redes de comunicación disponibles para IoT (Sigfox, LTE-M, NB-IoT y LoRa). Esto acotará las tecnologías sobre las cuales presentar una mejor solución.
Tracking con IoT sin usar datos móviles
En los párrafos anteriores hemos navegado sobre los aspectos generales para la implementación de soluciones con IoT. Ahora nos centraremos un poco en los aspectos específicos para la implementación de soluciones para realizar tracking con IoT aplicando enfoques restringidos a las situaciones en ausencia de cobertura de redes.
Antes de continuar es necesario hacer una aclaración, existen algunas otras tecnologías que no consideramos para realizar el seguimiento de objetos en interiores, las cuales sustentan su operación en principios diferentes a las basadas en las señales de radio. Entre las tecnologías descartadas podemos encontrar las ópticas, magnéticas, acústicas e inerciales. El motivo para descartarlas se debe principalmente a que son caras y/o que aunque pueden realizar el seguimiento de objetos no pueden identificarlos.
Retomando el hilo principal de esta sección, los componentes básicos para la implementación de sistemas RTLS en redes locales de IoT varían según el enfoque de solución que se tenga. Cuando se requiere implementar un sistema RTLS sin hacer uso de planes de datos móviles o sin cobertura de cualquier tipo de red. Consideraremos 2 enfoques principales de solución.
El primer enfoque, corresponde al seguimiento de un objeto con un dispositivo emisor (Tx) fijado a este. Donde el dispositivo emisor (Tx) depende de la energía de baterías (salvo en el caso del RFID). En el área donde se requiere hacer el seguimiento existen un conjunto de receptores (Rx) fijos que envían la información a un nodo de cómputo o directo a la nube para realizar la triangulación del dispositivo emisor.
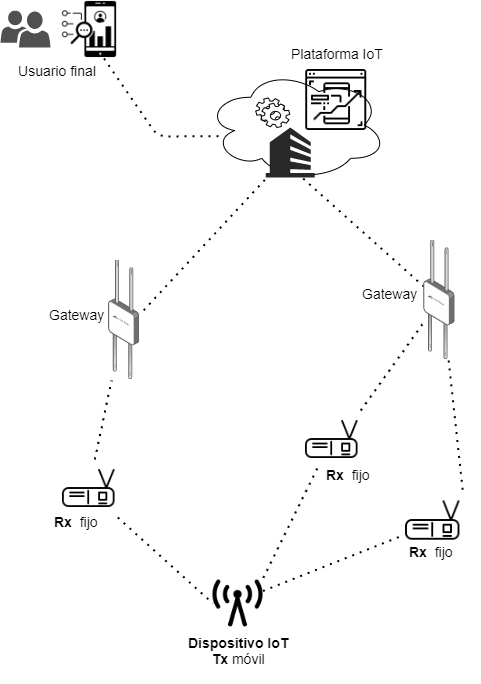
Nos podemos imaginar un caso de uso para este enfoque. Comencemos visualizando una bicicleta con un dispositivo Tx montado a ella, la bicicleta recorrerá distancias moderadas dentro de un terreno abierto, por tanto, se tiene un conjunto de restricciones para colocar infraestructura, por lo que se deben usar receptores con mayor alcance.
Los receptores pueden conectarse a gateways que reunirán la información y la enviarán a la nube. Estos esquemas no están restringidos al paradigma del cloud, también puede implementarse una arquitectura fog, edge o algún hibrido entre estas.
En el caso del segundo enfoque, donde se no se cuenta con cobertura de redes IoT, el dispositivo montado al objeto al que se le hace el seguimiento será un receptor de señales (Rx). Los dispositivos emisores (Tx) estarán instalados en el área donde se requiere hacer el seguimiento, y por medio de la señales recibidas por el receptor (Rx) se realizará la triangulación y la localización será conocida.
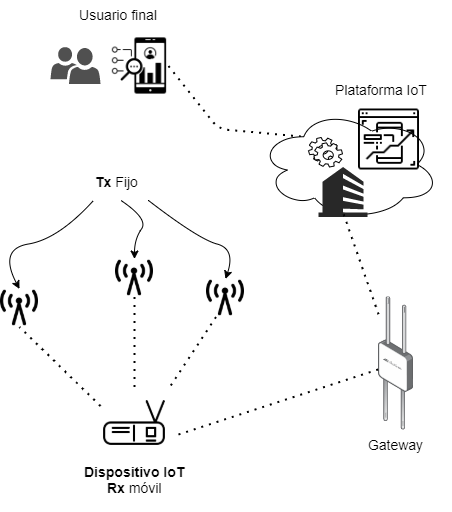
Un ejemplo de caso de uso para este segundo enfoque puede ser una persona que asiste a un corporativo como visita. A esta persona se le puede asignar un dispositivo que lee los transmisores (Tx) y reenvía a un concentrador la potencia con la que los percibe.
El resto de enfoques son derivaciones de los 2 primeros casos. Con variaciones según la tecnología que se implemente, por ejemplo si se puede implementar una red mesh con los Rx del sistema, etc.
Creo relevante concluir listando las tecnologías que considero que son mas apropiadas para realizar soluciones RTLS sin requerir cobertura o contratación de redes móviles de datos para IoT.
Actualmente, creo que en promedio la tecnología número uno para implementación de sistemas RTLS en cortas distancias es BLE. BLE o Bluetooth Low Energy es una de las tecnologías que encabeza la lista como una de las mas apropiadas para las aplicaciones RTLS y también aplicaciones para IPS (Indoor Positioning System), debido a que provee mejores resultados en cuanto al consumo de energía, la latencia de red y la precisión en la ubicación de los dispositivos. Otro punto benéfico es que esta tecnología esta ampliamente distribuida, por lo que la inversión en los elementos del sistema no es la mas alta y existe un amplio abanico de proveedores y de productos.
Existen otro tipo de tecnologías wireless que se diseñaron para enviar pequeños paquetes de información sobre distancias largas. A este tipo de tecnologías se les puede clasificar como LPWAN (Low Power Wide Area Networks). LoRa, Sigfox y NB-IoT se encuentran dentro de esta clasificación, la diferencia fundamental entre ellas, es que Sigfox y NB-IoT necesitan del área de cobertura del carrier, mientras que con LoRa tu puedes comprar tus gateways y colocarlos donde los necesites. Mi opinión es que LoRa es la tecnología mas adecuada para aplicaciones donde se requiere transmisión de señales en largas distancias (10 – 20 km) y en lugares donde no existe infraestructura o cobertura de red. Otro punto favorable para LoRa es que trabaja en frecuencias diferentes a 2.4 GHz. En América trabaja sobre una frecuencia de 915 MHZ, lo que representa una ventaja pues es menos susceptible a saturarse o captar interferencias, en comparación con las redes como las que se implementan con WiFi, BLE, Bluetooth, ZigBee, etc.
Aunque en los diagramas aquí presentados se usan la simbología de los dispositivos Tx, o transmisores de manera indistinta se debe tomar en cuenta que el diseño y funcionamiento entre un transmisor fijo a la infraestructura y uno móvil es muy diferentes, empezando por el diseño de sujeción al objeto, colores, forma/ergonomía, uso de la batería, cadencia de transmisión, etc.
…
Actualmente LoRa es la única tecnología de bajo consumo eléctrico para aplicaciones RTLS outdoor/ indoor.
Yazaed Guadarrama
Ingeniero, científico y emprendedor por vocación, profesional mexicano de la automatización . Se ha desempeñado como ingeniero de sistemas de control e instrumentación para Oil & Gas y minería. Dedicado al desarrollo e investigación de ciencia y tecnología, así como a la implementación de proyectos.